Aerospace Systems
Technology and Rocket Operations – BOOM 2004
Background
Created in the Fall of 2000 as a research and design
project for students interested in aerospace engineering, the original goal of the
Aerospace Systems Technology and Rocket Operations (ASTRO) team was to design an
autonomous landing vehicle similar in design to the Mars Rover lander - able to land safely using rocket engines to slow
its descent. After development and
initial testing, the autonomous landing vehicle (ALV) would be dropped from a
height sufficient to allow the vehicle to achieve terminal velocity. This ALV would then land itself under its own
power and without the aid of parachutes or stabilizing fins, making it
operational in a generic environment – an important part of the project.
This year, ASTRO’s goal is to
complete one of many steps which will take place before completion of our
ultimate goal: developing a vertical-takeoff, vertical-landing (VTVL) vehicle which
will initially rise a few feet of the ground under its own power, autonomously hover
and demonstrate its stability over the course of a few seconds, and then land safely
and without damage. After this goal is
achieved, the current design will be improved to either be able to translate
laterally while retaining stability, and ultimately to achieve the goals set
out for the original ALV concept. A
model of the original ALV design concept can be seen below:
Work in
Previous Semesters
The project began with determining overall system
performance requirements and the testing of a commercially available
liquid-fueled rocket motor. The original
rockets used ran on gasoline and hydrogen peroxide, two propellants readily
available to us, but there were many problems with their design. Sealing poppets
would never seat, presenting a safety hazard; the engines weren’t throttleable, and they weren’t designed to burn for more
than ten seconds. By ASTRO’s
second year, design had begun on our own rocket engines, which were meant to
burn for a minute and operate on hydrogen peroxide and gasoline, producing a
target thrust of 100 lbs. At the same
time, our electrical group was trying to determine what type of control system
we wanted to use for autonomous control of the ALV. Neural networks were initially considered,
and a PID controller was developed for a 3 degree of freedom test-bed, which
was created to obtain practice in developing a sample control system on a simpler,
lower cost dynamical system.
During the 2001-2002 academic year,
ASTRO’s test site was also developed, located on a
plot of land owned by the University.
This land was first cleared out, and a testing region built to establish
a permanent testing site for the ALV rocket engines. In addition, test stands were designed and
built to work with the commercially purchased gasoline-peroxide engines being
tested at that time.
The team then spent a year developing and testing the next
generation of engines, with limited successes.
These engines had a stainless steel body with ceramic lining to prevent
overheating, and a titanium throat plug.
Due to new problems obtaining hydrogen peroxide caused by health and
safety concerns as well as complications with its storage, the propellants were
switched to propane and Nitrous Oxide. The
problem with these engines turned out to be the injector-manifold system, an
overly complex design which was unable to provide the required flow rate to
achieve ignition with our new gaseous propellants. The test stand was also redesigned to work
with the new engine design.
Last year, the electrical group did a lot of control system
development with the previously mentioned test-bed, and also developed a 6-degree
of freedom helicopter system which allowed us to test on a system similar to
the ALV. By the end of the spring
semester, the electrical group had the helicopter operational, and had
developed a control system for the VTVL in VX Works, a small, quick operating
system. Since then, work has begun on second-
and third-generation control systems for the VTVL.
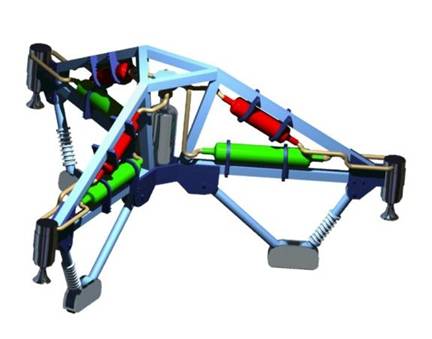
The VTVL structure was also built last year, designed to
mount the three rocket engines, fuel tanks, the onboard electronics, and
onboard computer and sensors rigidly and with low weight. A picture of the structure can be seen below
(without mounted components):

2004 –
Progress and Goals
This semester’s goal for the team is to develop the control
and propulsion subsystems to a level such that a first liftoff in late April of
this year occurs. Progress this semester
has been very strong, with design, manufacture and testing of subsystems going smoothly. I’ll outline the basic work done up to this
point.
After redesigning the rocket manifold system to two simple
impinging inlets, checking that we could obtain high enough mass flow rates
with our pressure-fed fuel feed system, and relocating the spark plug to
directly between the Nitrous and propane inlets, we tested this system earlier
this semester and had our first successful firing. A picture of the engine firing (with a clear
combustion chamber for purposes of verifying ignition) is shown below.

The thrust obtained from this test is not known, due to the
absence of load cells on this previous-generation test stand. Since this test, our test stand has been
redesigned to test three engines at once, obtain thrust and temperature data,
and hold a data acquisition board. A
close-up of the 2nd generation Nitrous Oxide-propane engine with old
test stand at the test-site, after testing:

In addition to getting our 2nd generation engines
to fire, we developed a new set of engines this semester which are designed to
get higher thrust and better combustion, and were designed to burn longer. Analysis was performed on these engines using
ANSYS and Fluent for determining fluid flow and heat transfer in the combustion
chamber and nozzle. The combustion
chamber for the first version of this engine has now been manufactured, and the
engine as a whole will be ready for testing within a few weeks. Our current limitation in testing is the
winter weather.
On the controls system side of things, a few mechanical
engineers worked with the electrical group to form a control systems group
during the fall semester. This group
concentrated on the dynamics of the VTVL, and creating a realistic dynamical
simulation in Matlab which takes into account thrust
misalignment, wind forces, 6 DOF accelerometer sensor signal noise, and other
sources of disturbances. With this
simulation complete, a next-generation control system for the VTVL is currently
being designed by undergraduate and graduate students in ECE and CS. We are also in the process of designing
electronic circuits for support of data acquisition during testing.
The VTVL’s onboard power system
is also currently being developed – powering the spark plugs and solenoid
valves is currently being done with car batteries during testing, which are not
ideal for use on the VTVL due to their weight.
Looking ahead, we expect to complete testing on the 3rd
generation engines by the middle of this semester and determine the thrust
response we can expect for given pulse-width modulation (PWM) inputs to the
fuel-feed system by early April. This
data will be used with the control system algorithm to allow for variable
thrust output, either using PWM of our on-off solenoid valves, or variable area
flow control valves. Our algorithms will
also be translated from Matlab to C, so that they can
be run inside the VX-Works operating system which will be used on the VTVL’s onboard computer. All sub-teams are currently working on systems
integration while developing their own subsystems in preparation for first
liftoff in April. Pending a successful
liftoff, we may choose to develop a wireless communication system for the VTVL
for transmitting telemetry data to the computer controlling the test procedure.
This semester is an exciting time in ASTRO’s
development of an autonomous, rocket-controlled Vertical-Takeoff,
Vertical-Landing Vehicle. If you’d like
to get involved, contact a sub-team leader today and let us know your area of
interest – we’re always looking for a few good engineers.